Il s’agit d’un réducteur compact càd d’un dispositif permettant de modifier le rapport de vitesse .
Ce dispositif permet un rapport de vitesse très important en un seul étage.
Ce dispositif ne comprend pas de pièce déformable et tout les mouvement sont centré.
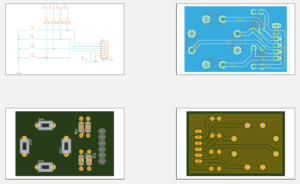
Le dispositif comprend :
-
Une couronne comportant deux dentures circulaires concentriques une extérieure d’entrainement avec Ne dents diamètre moyen De module Me et une intérieure dite de synchronisation avec Ns1 dents diamètre Ds1 module Ms.
-
Une deuxième couronne comportant deux dentures circulaires concentriques une extérieure d’entrainement avec Ne dents diamètre De module Me et une intérieure dite de synchronisation avec Ns2 dents diamètre Ds2 avec par exemple suivant le rapport de division demandé Ns2 = Ns1 + 1 module Ms. Ds2 est suffisemment proche de Ds1.
-
Un porte satellite avec de petits engrenages circulaires ( par exemple 1 ou 3 engrenages ).
Ces engrenages de faible diamètre sont de même module Ms que les deux couronnes intérieures.
-
Un engrenage d’entrée Ni du même module Me que les couronnes d’entrainement.
-
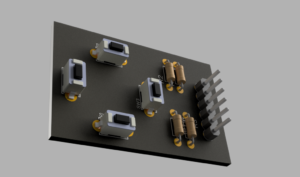
Les éléments sont assemblés dans cette ordre :
-
De manière libre sur l’axe de sortie la première couronne.
-
L’engrenage d’entrée perpendiculaire aux couronnes et s’engrène avec les dentures d’entrainement.
-
Le porte satellites avec les satellites. Le porte satellite est solidaire de l’axe de sortie. Les engrenages satellites tourne librement.
-
La deuxième couronne qui s’engrène à la fois avec les satellites et l’engrenage d’entrée.
Le rapport de réduction est alors d’environ : (Ns2 – Ns1) / Ns1