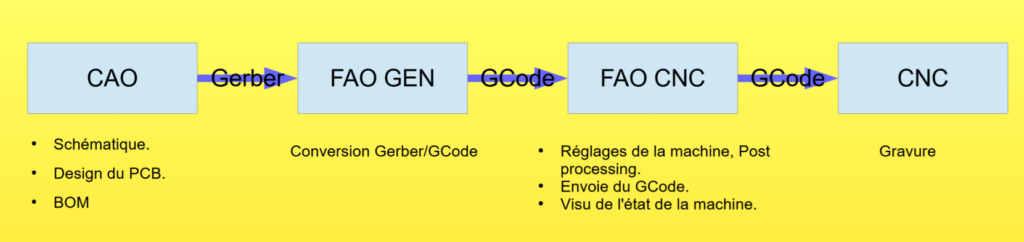
Un workflow entièrement OpenSource, pas de Cloud, pas de dépendance
- La CAO avec KiCad : .https://www.kicad.org
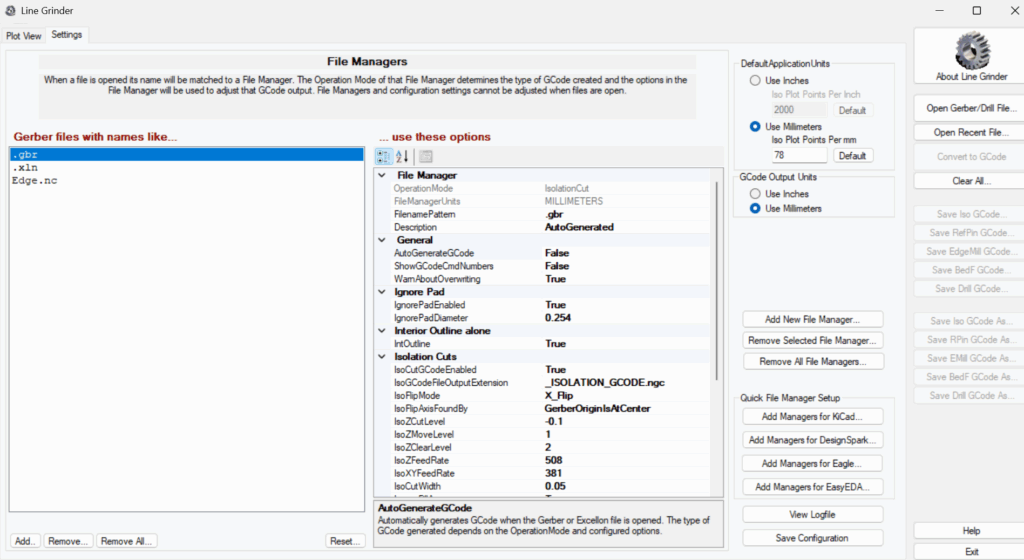
- La FAO avec LineGrinder fmfcd : génération de GCode exclusivement pour de la gravure de PCB . ( Pour l’instant seulement sur Windows ) .Line Grinder fmfcd.eu v3.2 beta
ou FlatCam http://www.flatcam.org/download
- La commande machine avec bCNC : https://github.com/vlachoudis/bCNC
- Le firmware de la machine CNC avec grbl : .https://www.grbl.org