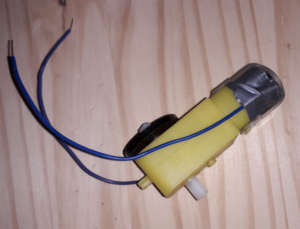
- Préparation des moteurs :
- Souder des fils de connexion de 10 cm
- avec du scotch Gaffer entourer immobiliser les fils pour éviter de tirer sur les connecteur du moteur qui sont fragiles :
- Fabrication de la carte Driver ( 1 heure ) :
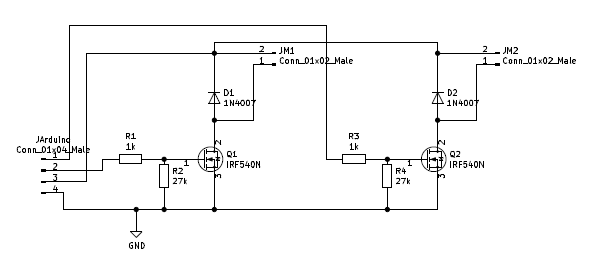
- Liste des composants :
- 2 x Résistances 1/4 W 1K
- 2 x Résistances 1/4 W 27k
- 2 MOSFET IRF630
- 1 morceau de plaque d’essai à bandes ou à pastilles.
- Schéma :
- Implantation sur la plaque à bandes :
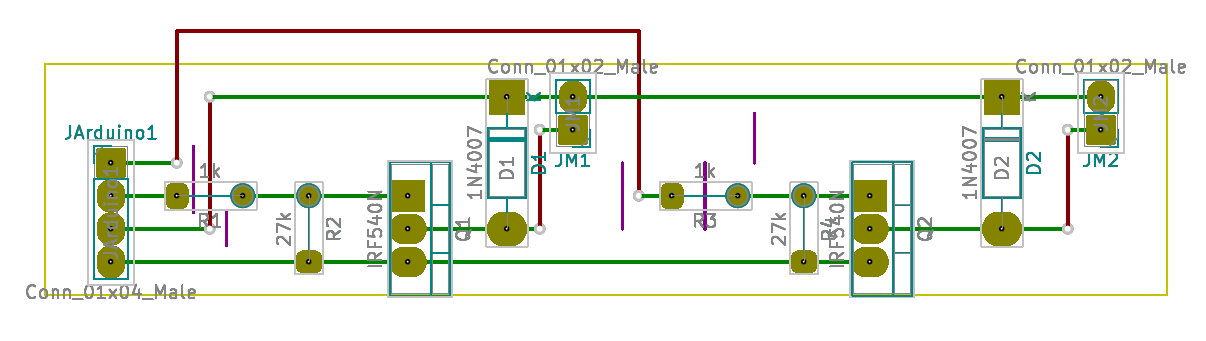
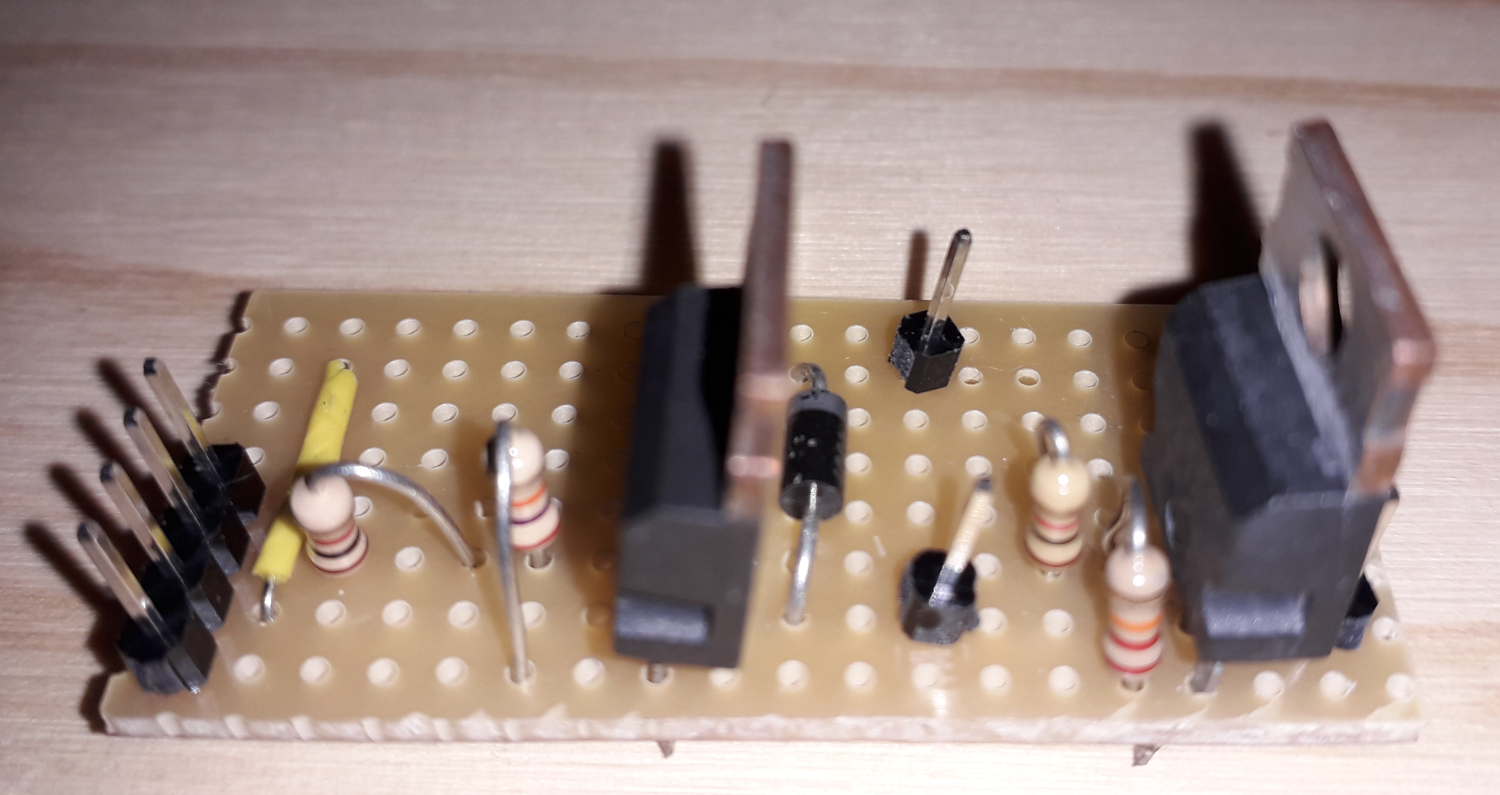
- Implantation et brasage des 8 composants :
- Soit de la gauche vers la droite en coupant les pistes ( violet ) au fur et à mesure. On va de l’entrée du driver vers la sortie.
- Soit en commençant par couper les pistes, ensuite souder les diodes et les fils de pont, puis les connecteurs, en terminant par les deux transistors.
- Attention les MOS-FET n’aiment pas l’électricité statique alors décharger vous de votre électricité statique en touchant une borne de terre.
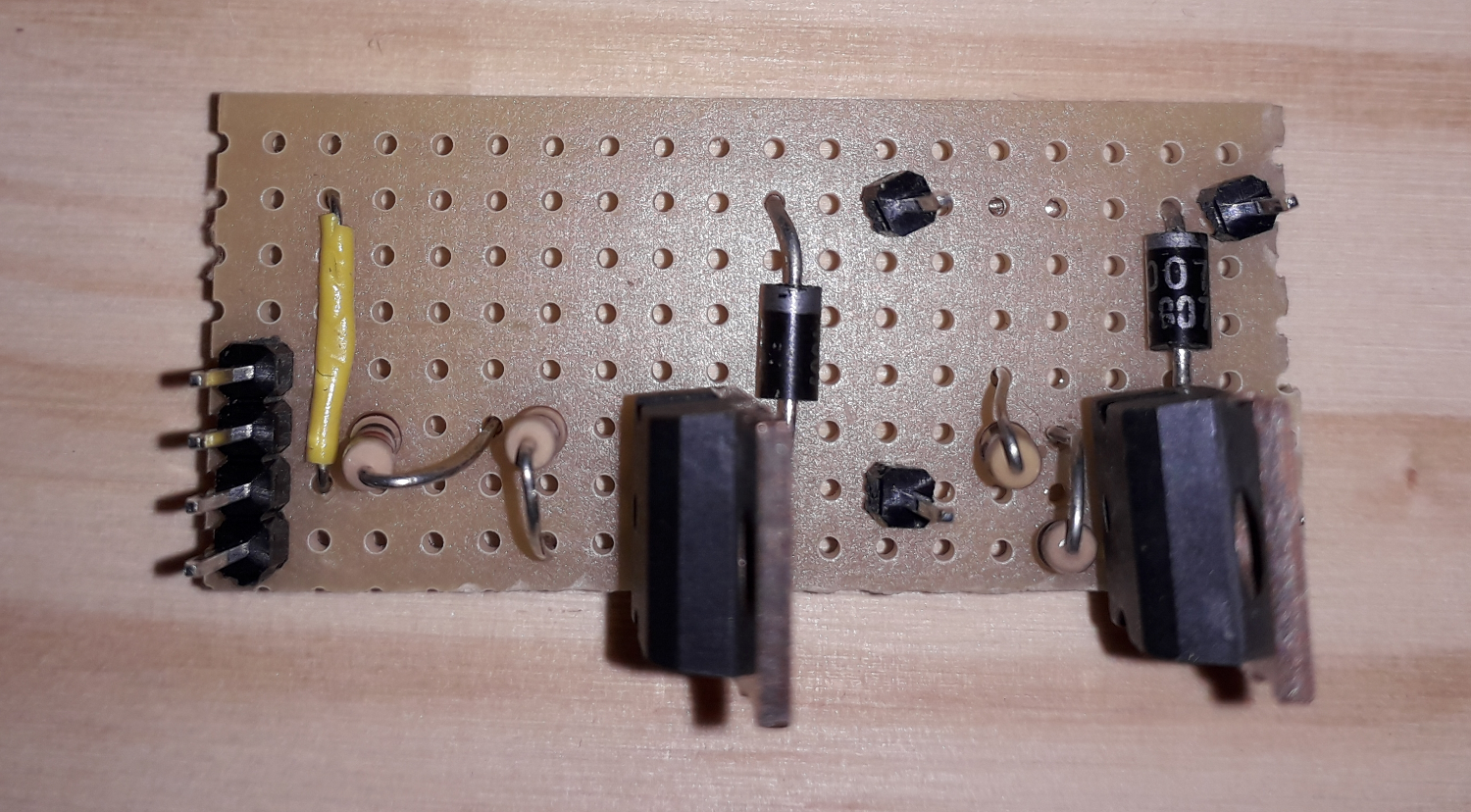
- Résultat final :

- Liste des composants :
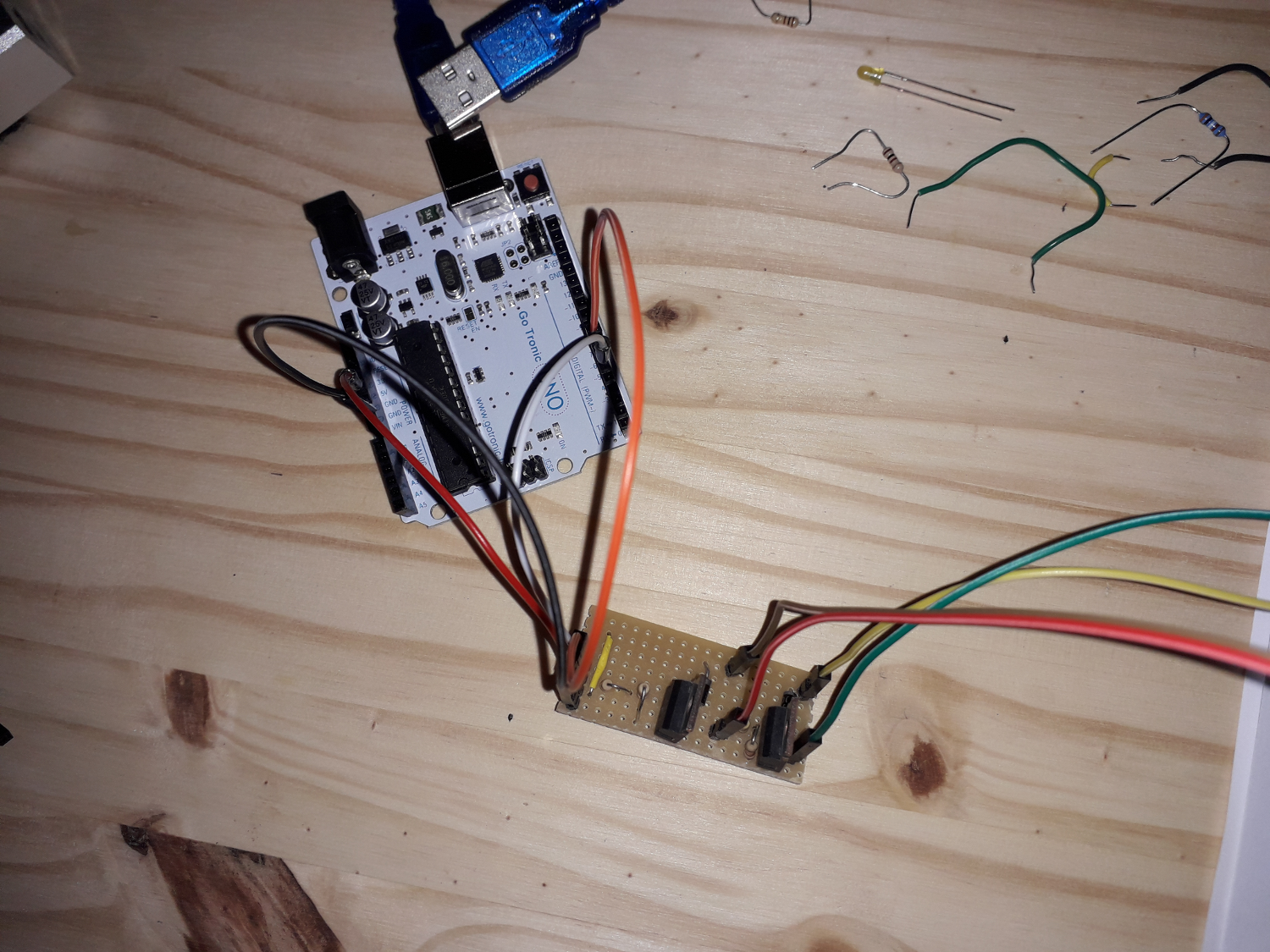
- Test et essai de l’électronique :
- Raccordement à la carte Arduino ( ici une UNO ) :
- Programme Arduino de test des moteurs :
TestMoteurs
- Raccordement à la carte Arduino ( ici une UNO ) :
- La mécanique :
-
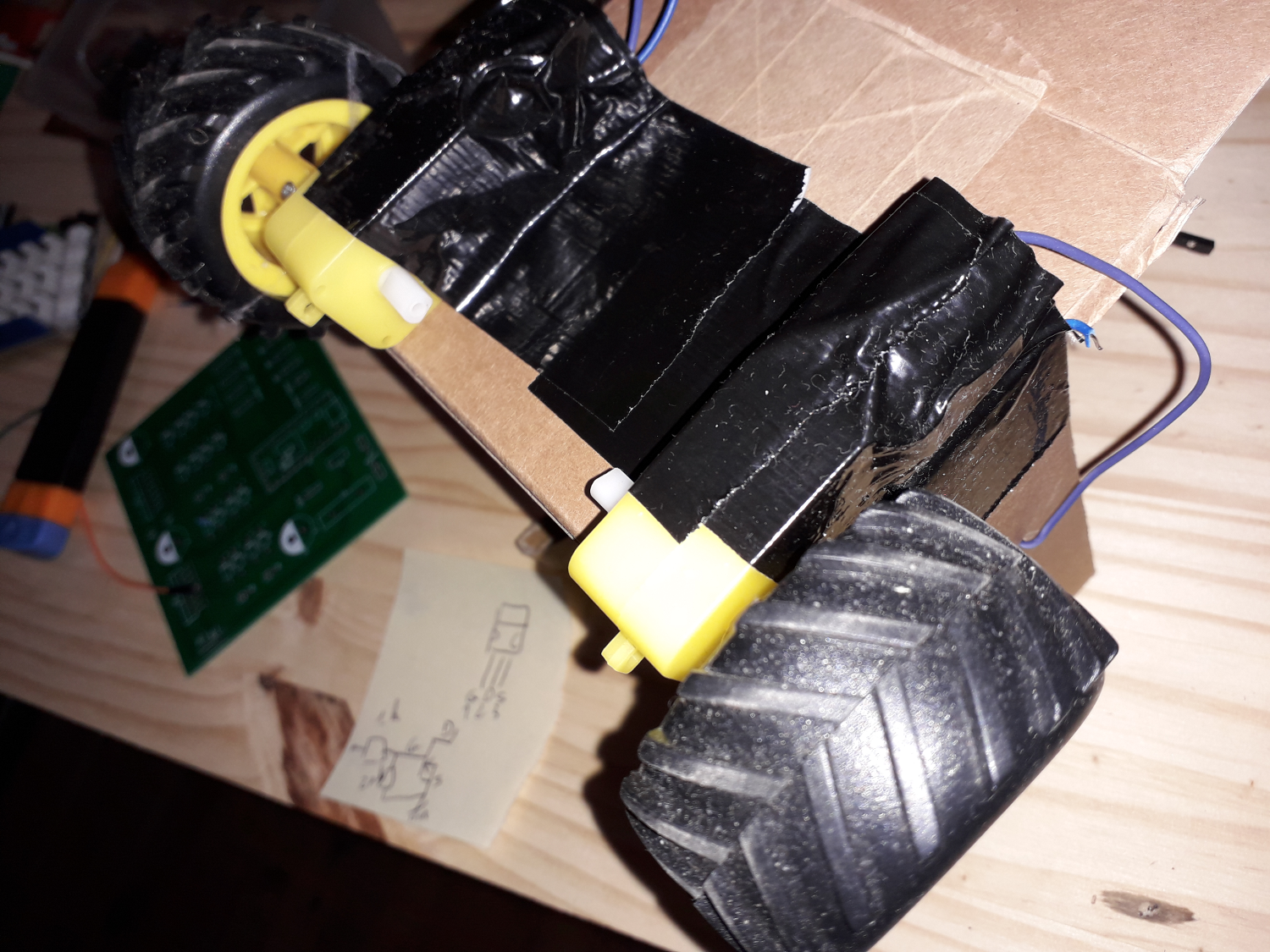
- Fabrication du châssis :
- Choisir une boite en carton de taille adéquate.
- Découper le haut de la boite à environ 5 cm de hauteur.
- Fixation des moteurs avec du ruban adhésif de type Gaffer.
- Fabrication du châssis :
- Fabrication des roues :
- A partir de roues récupérées sur un jouet cassé.
- à partir de la CAO fusion 3D :
https://a360.co/2QHKI1T
ou du fichier .stl suivant RoueMinimalRobot .
- Fixation des roues en force ou avec un perçage de l’axe sur les plats. Cela dépend de la roue utilisée.
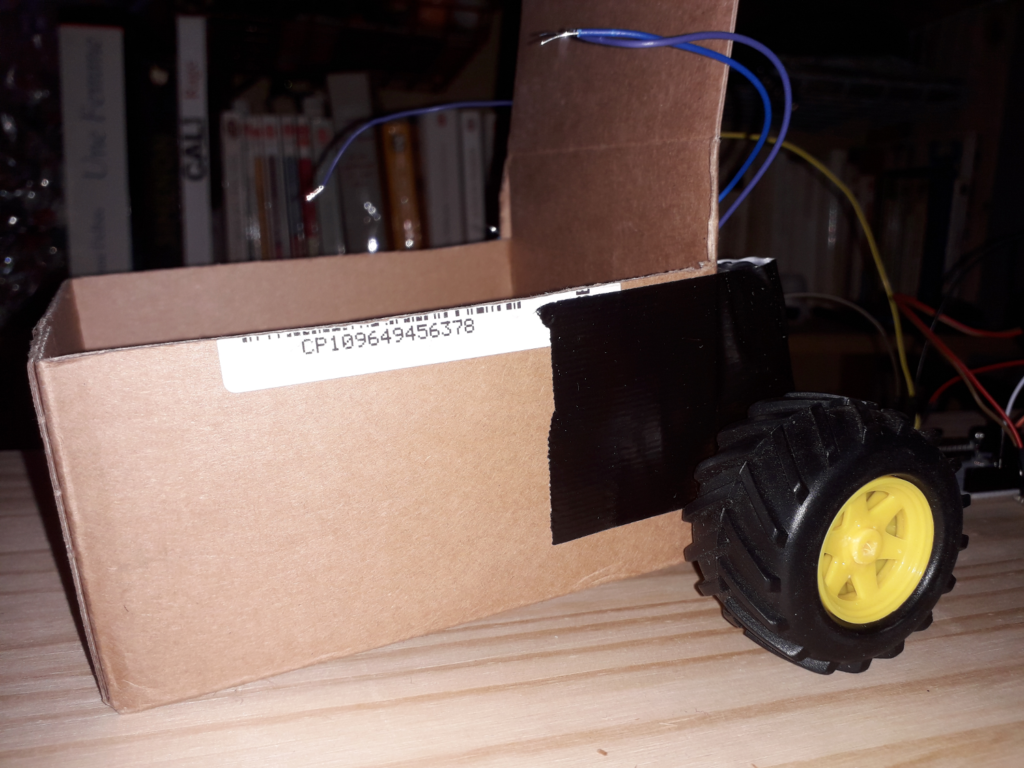
- Un exemple de résultat :
-
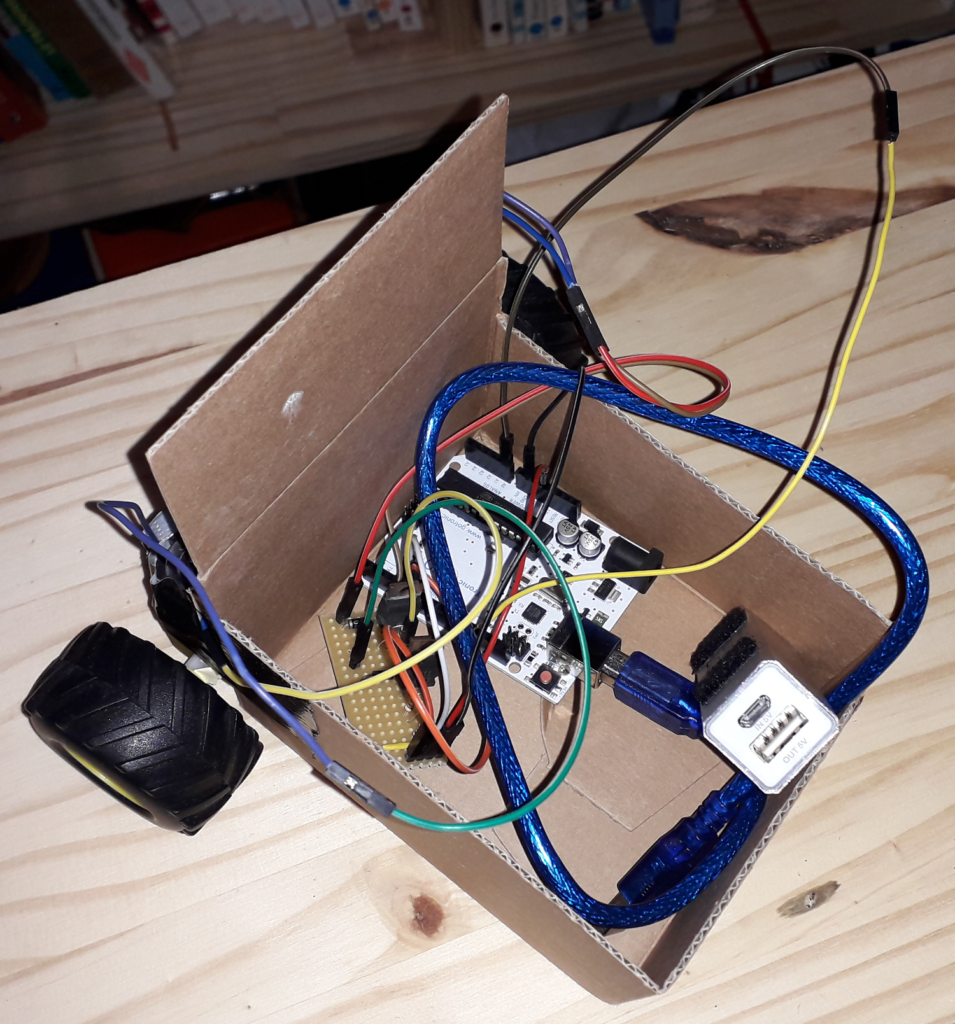
- Assemblage complet :
- Percer des trous dans la boite pour fixer les fils des moteurs
- Fixer la carte driver avec deux trous dans une des parois et un petit fil électrique ou un serre câble.
- Aménager une place pour la batterie à l’avant du robot pour qu’il y ait un peu de poids sur l’axe des roues de tractions.
- Relier la carte Arduino et la carte driver.
- Placer les fils de démarrage de façon qu’ils soient accessibles.
- Exemple :
- Premier test : brancher la carte Arduino à la batterie PowerBank. Pour démarrer il suffit de connecter les deux fils de démarrage. Attention : poser le robot par terre afin d’éviter les chutes depuis la table.
Essayer d’aller droit !
Après quelques petits réglages :
C’est mieux non ! - Avec la carte DigiSpark :
- Installation des pilotes de la carte :https://github.com/digistump/DigistumpArduino/releases/download/1.6.7/Digistump.Drivers.zip
- Dans l’IDE Arduino, ajouter le dépôt : « http://digistump.com/package_digistump_index.json » dans le gestionnaire de cartes supplémentaires ( préférences).
- Dans le gestionnaire de carte choisir « Digistump AVR Boards« .
- Ne brancher la carte car la partie USB n’est valide qu’à certaines conditions. Au téléchargement Arduino vous demandera de brancher la carte et il faudra attendre que le téléchargement soit terminé avant de la débrancher.
- Le robot parcourt son premier cercle
- …
Electronique et Informatique Embarquées
Electronicien d'art, formations, preuves de concept, IOT,… Blog garanti sans IA générative !