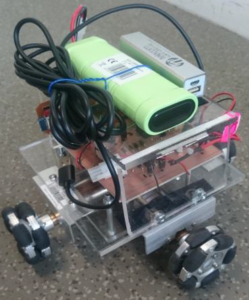
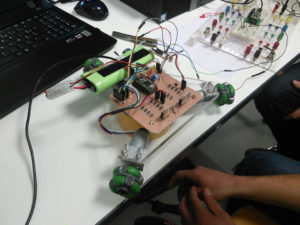
Prototype maison de Robot holonome 3 voies avec communication BLE et son application Android.
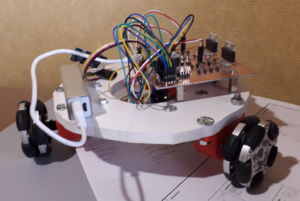
Merci à l’openFactory42 pour l’utilisation de leurs imprimantes dans la fabrication des supports moteurs.

Première essai :
Electronique et Informatique Embarquées
Electronicien d'art, formations, preuves de concept, IOT,… Blog garanti sans IA générative !
Prototype maison de Robot holonome 3 voies avec communication BLE et son application Android.
Merci à l’openFactory42 pour l’utilisation de leurs imprimantes dans la fabrication des supports moteurs.
Première essai :
Une partie du labo que j’ai mis en place à TSE :



Application d’auto-hypnose utilisant le flash du smartphone :
https://play.google.com/store/apps/details?id=eu.fmfcd.cocardiosumnum2
Utilisation d’une carte FreeSoc2 dans l’environnement Arduino ici..



une application Android de cohérence cardiaque ou de relaxation :
https://play.google.com/store/apps/details?id=eu.fmfcd.cocardio