Deux gants latex, un ESP32, des drivers MOSFET, 1 compresseur, 1 pompe, 4 valves électromécaniques.
Catégorie : Non classé
De l’idée à la preuve de concept en quelques heures.
Idée : télécommande de robot longue portée avec 4 boutons de direction.
Conception avec Fusion360 pour le bloc de 4 boutons. 1 heure.
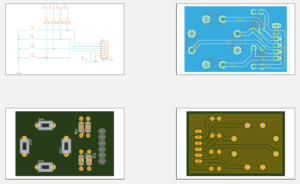
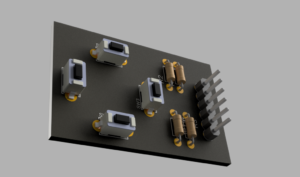
Fabrication avec une micro-fraiseuse + câblage des composants : 1 heure.
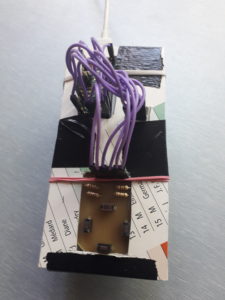
Câblage des modules : Teensy + nrf42 + bloc de 4 boutons. 1/2 heure.
Programmation : 1 heure.
Mise au point : 1/2 heure
Robot ballons 2022
Qui a dit qu’une roue carrée ne pouvait pas tourner ?
ESP32 + 4 valves pneumatiques + compresseur + 5 drivers Mosfet

Caméra thermique à basse résolution
Teensy + Grid eye de Panasonic.
Robot ventouse simple
Robot avec deux ventouses :
Robot suivant une bouteille
Le robot holonome est équipé d’une raspberry pi 4 avec sa caméra.
Un programme d’IA écrit en Python identifie les objets de type « bouteille » et indique le déplacement à effectuer à la base robot.
Pinces à main automatique
Premiers tests :
Double pince :
Transformer un module Grove Lora en node Lorawan
Le firmware interne du module Grove Lora de Seeduino ne permet pas de constituer un node LoraWan.
Mais on peut reprogrammer le mcu Atmega168 en modifiant le code de l’exemple de Clemens Riederer et en utilisant la bibliothèque SPI standard.
C’est ICI.